AER201 Autonomous Robot Project
One of my second year design courses involved the full development of an autonomous robot capable of:
- Navigating a 5x6 ft. playing field with obstacles
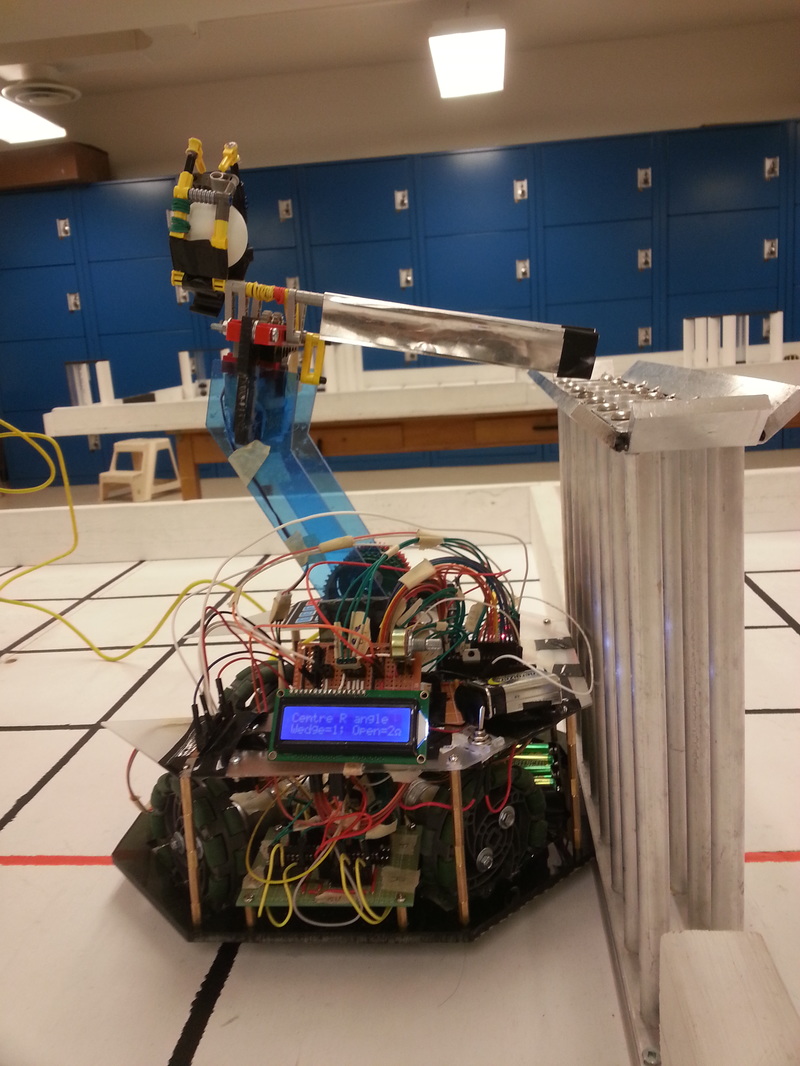
- Collecting ping pong balls from hoppers
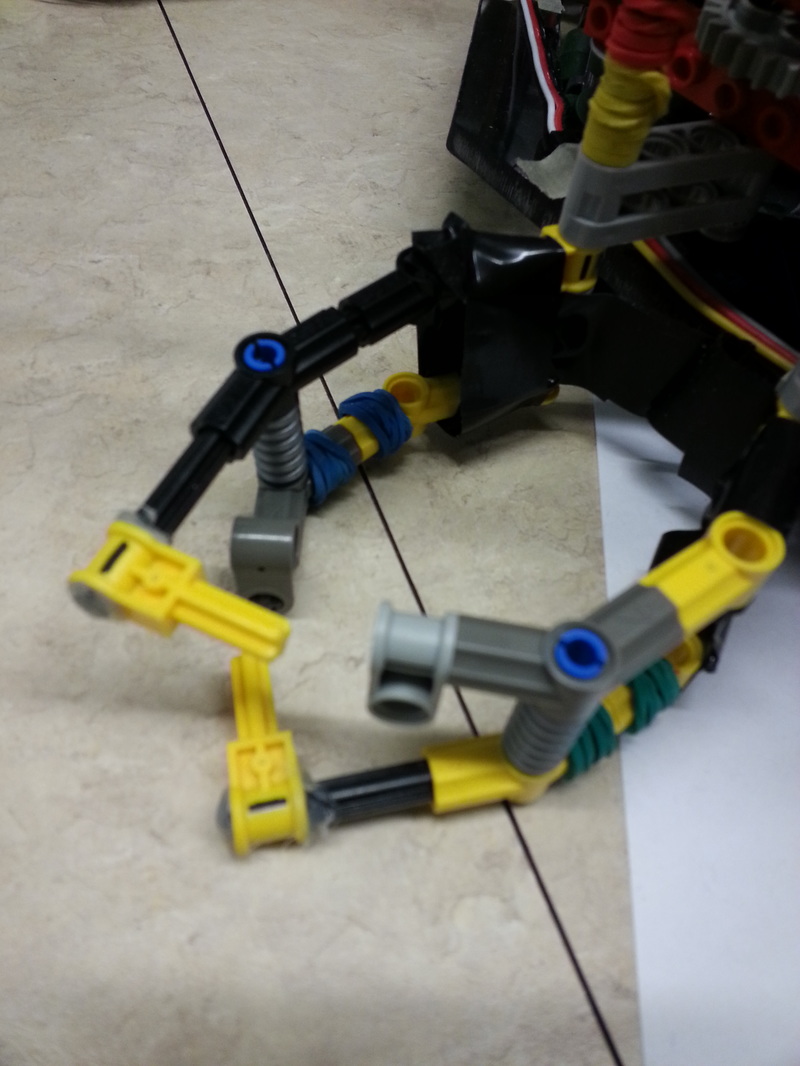
- Accurately placing the balls into a modified connect-four game board against an opposing player
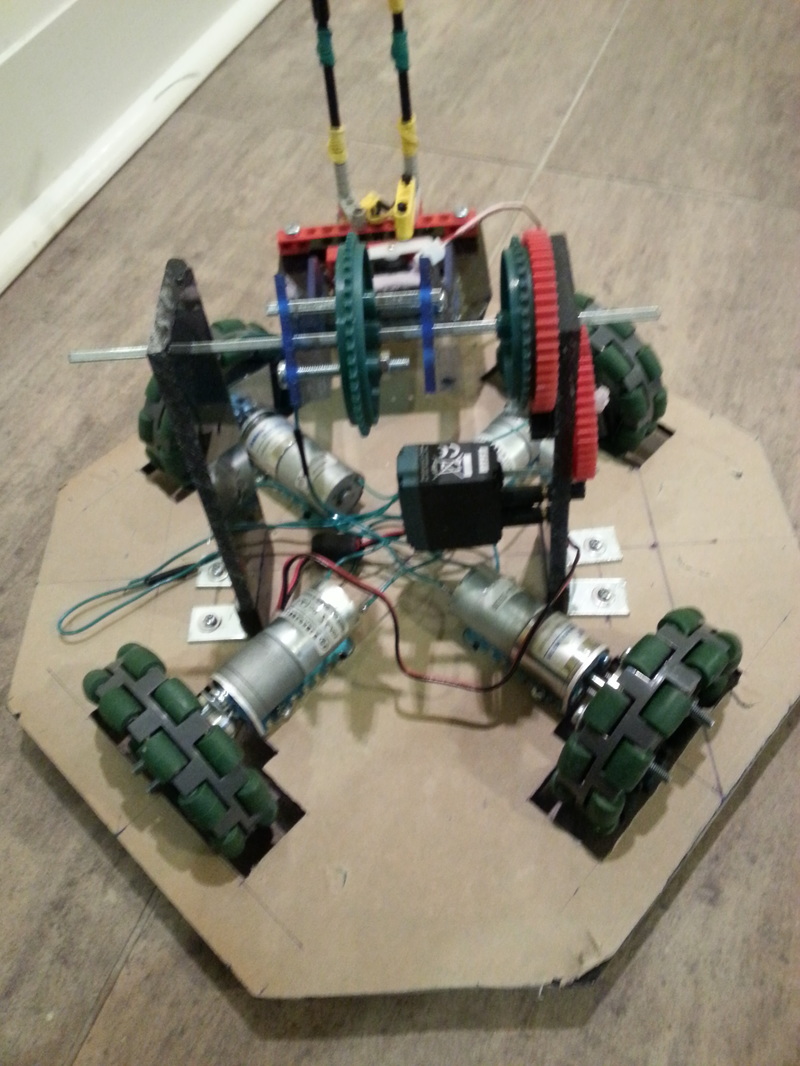
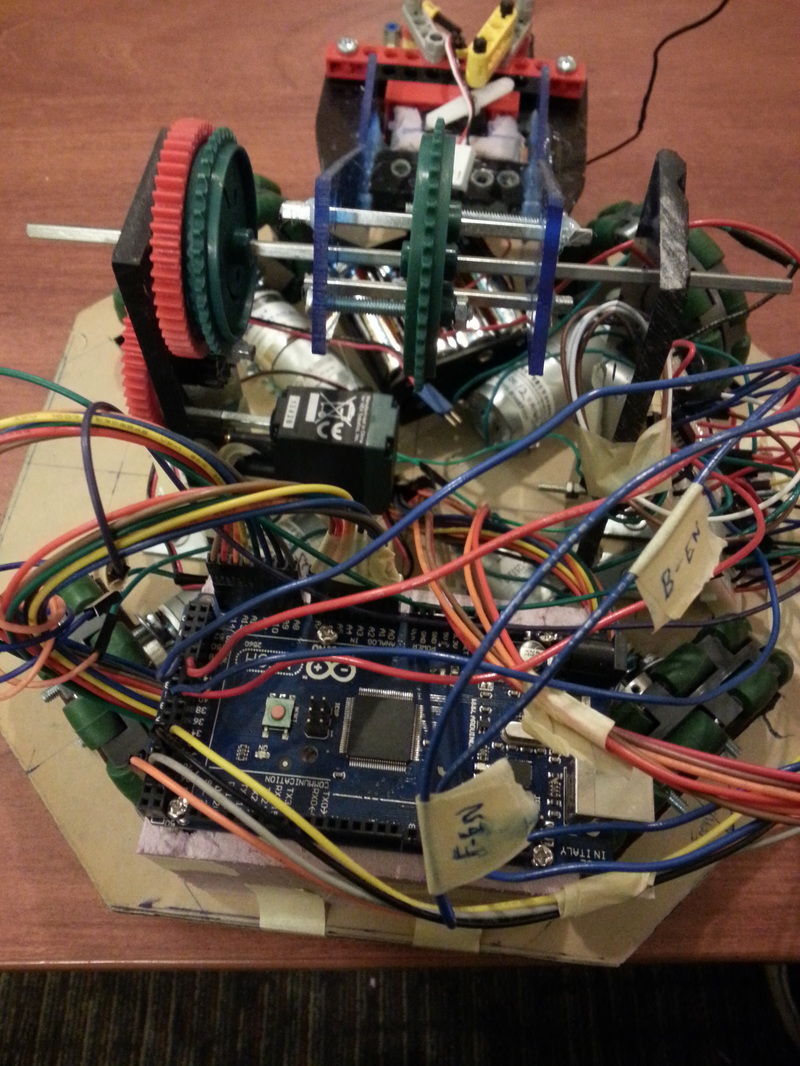
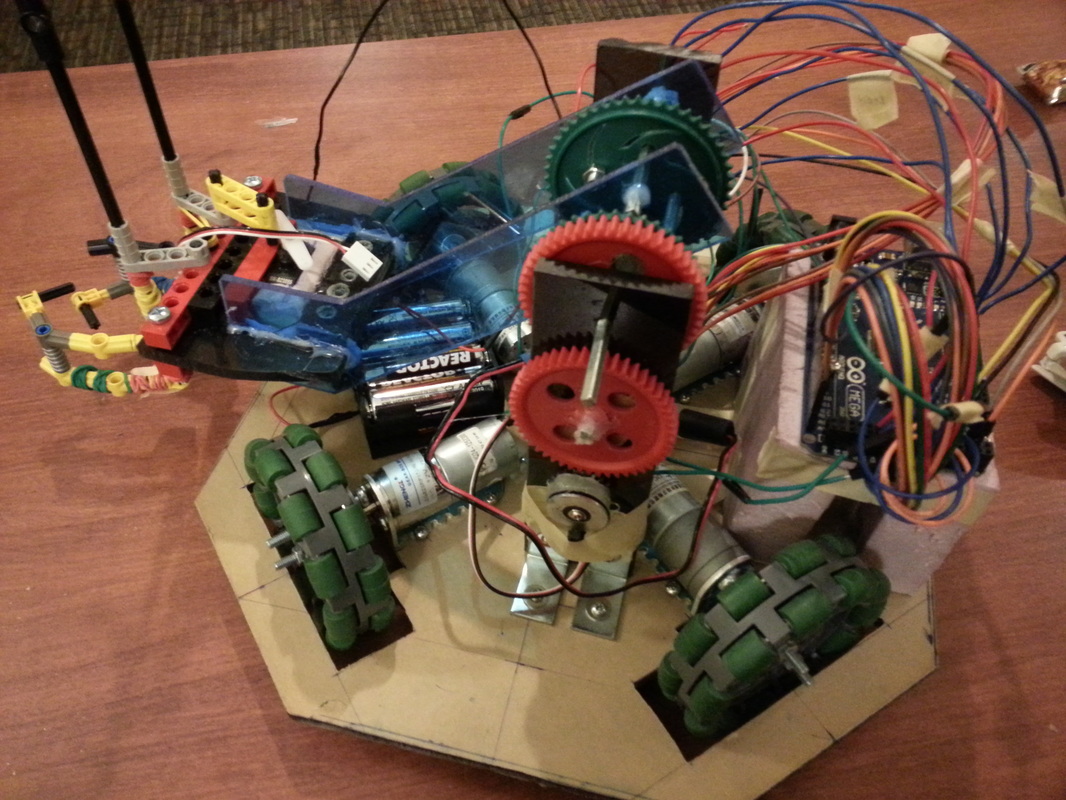
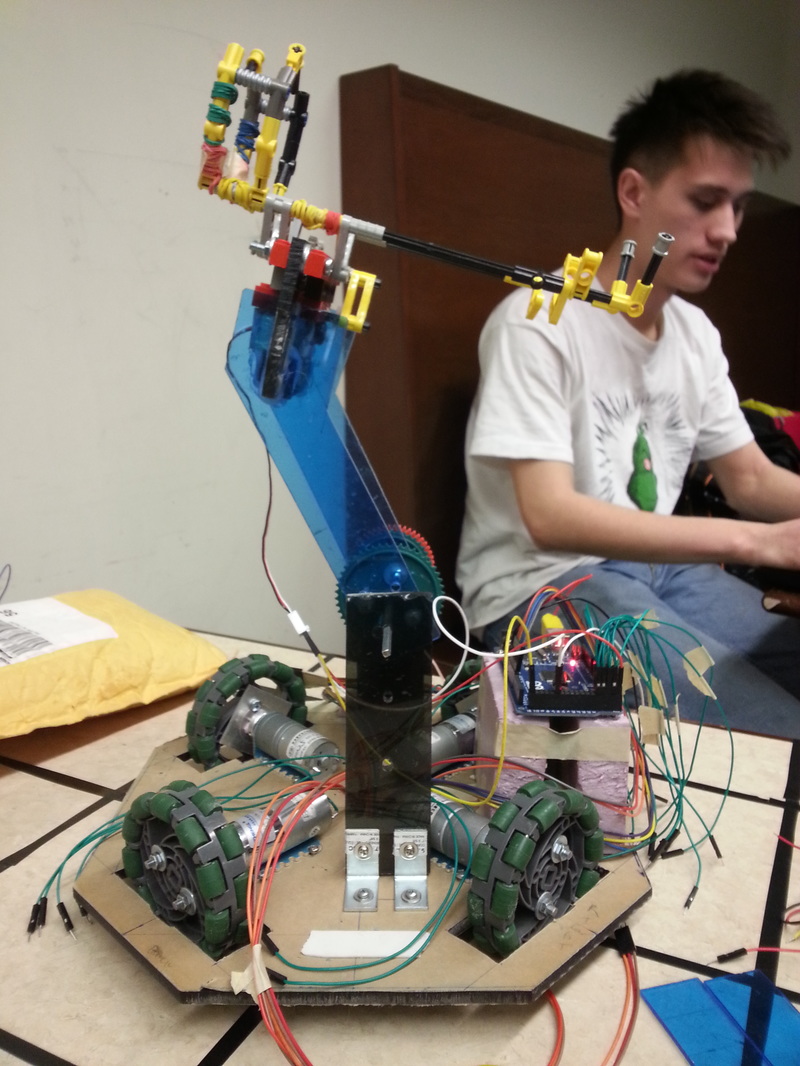
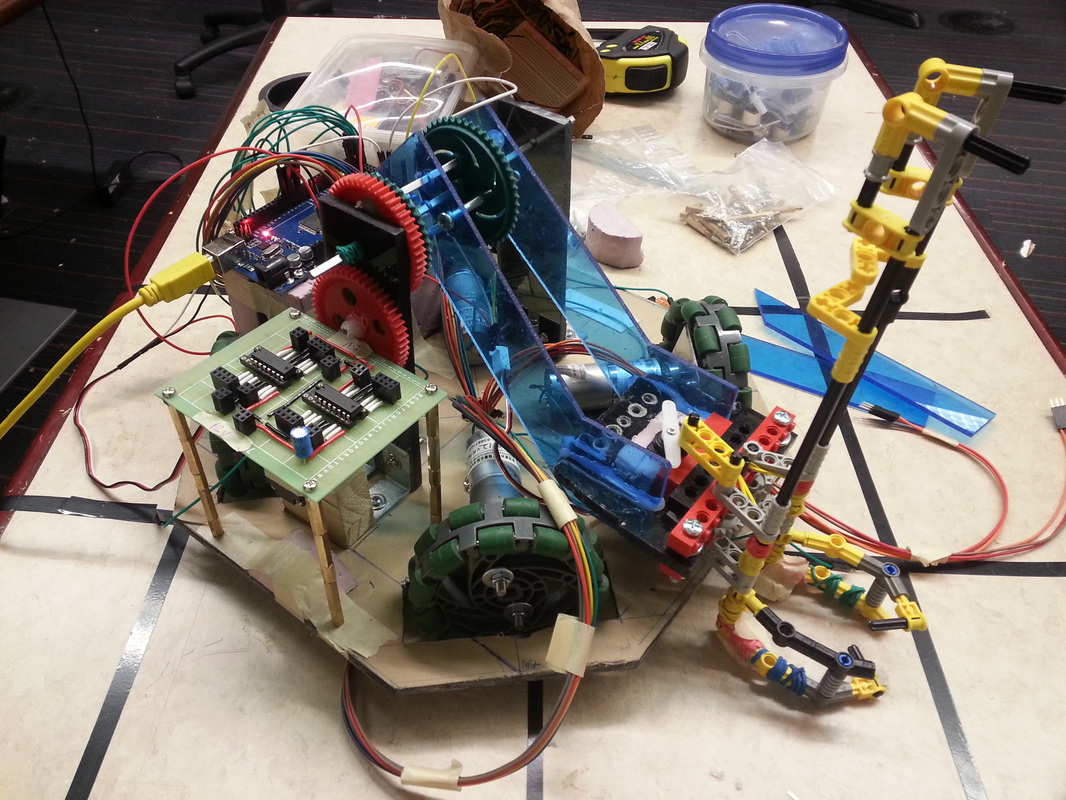
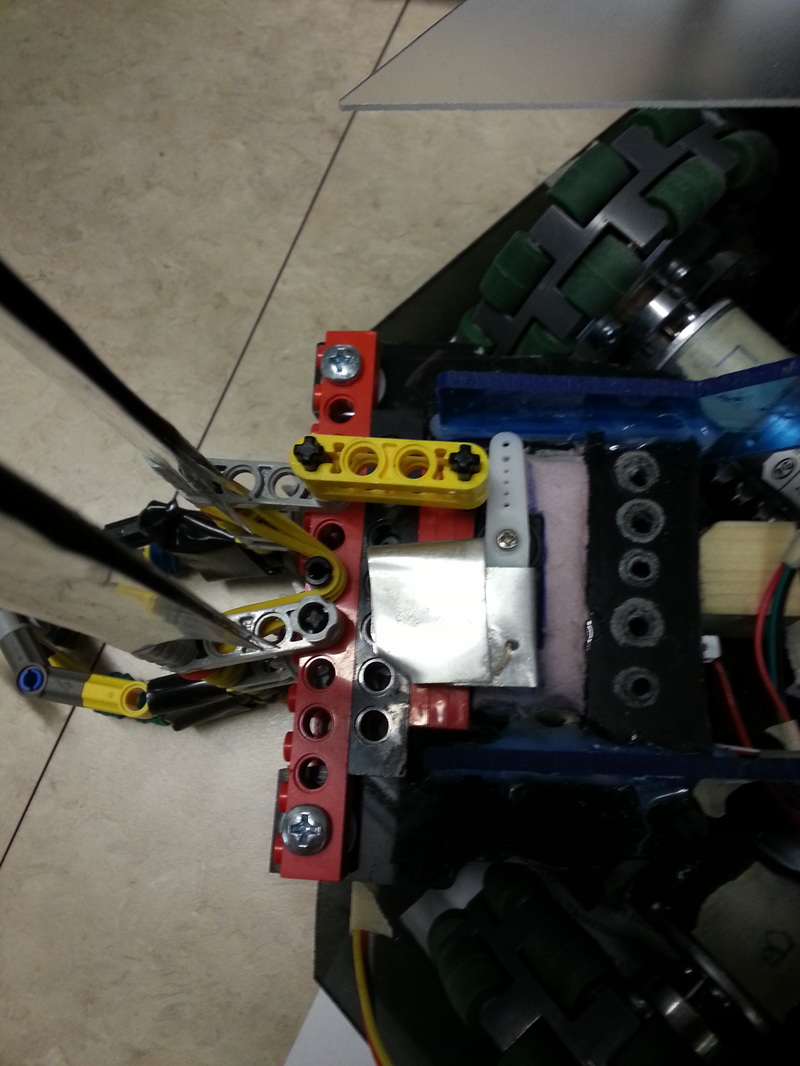
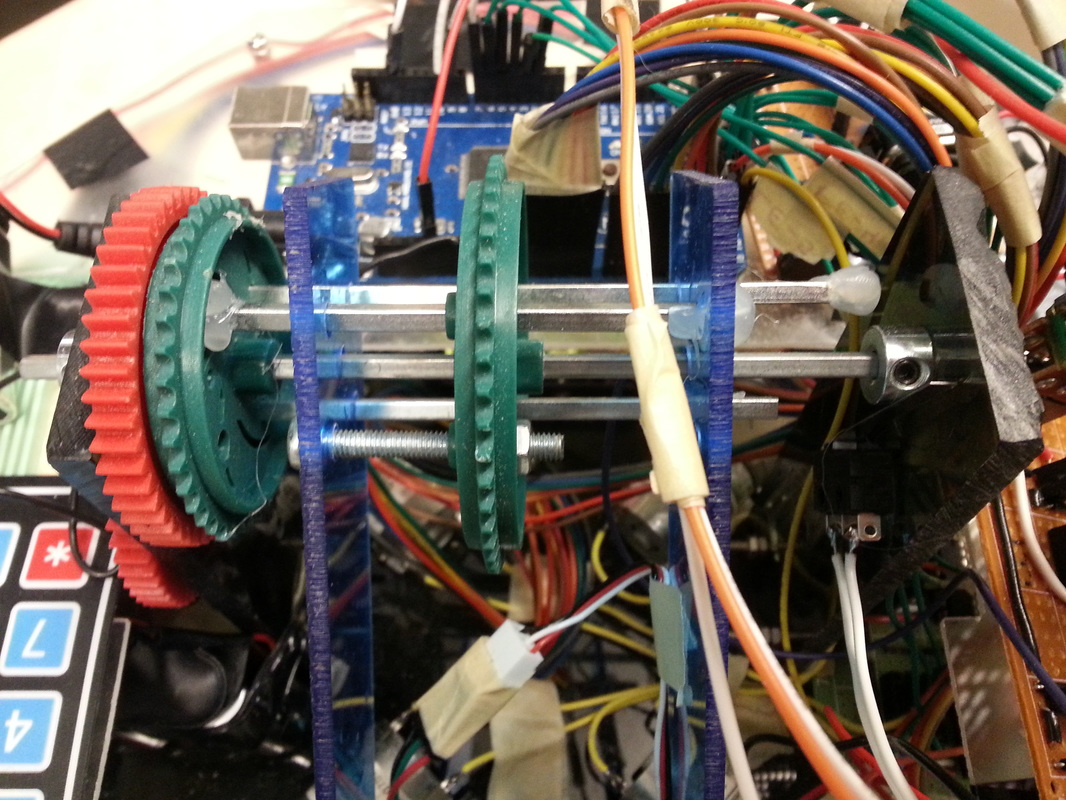
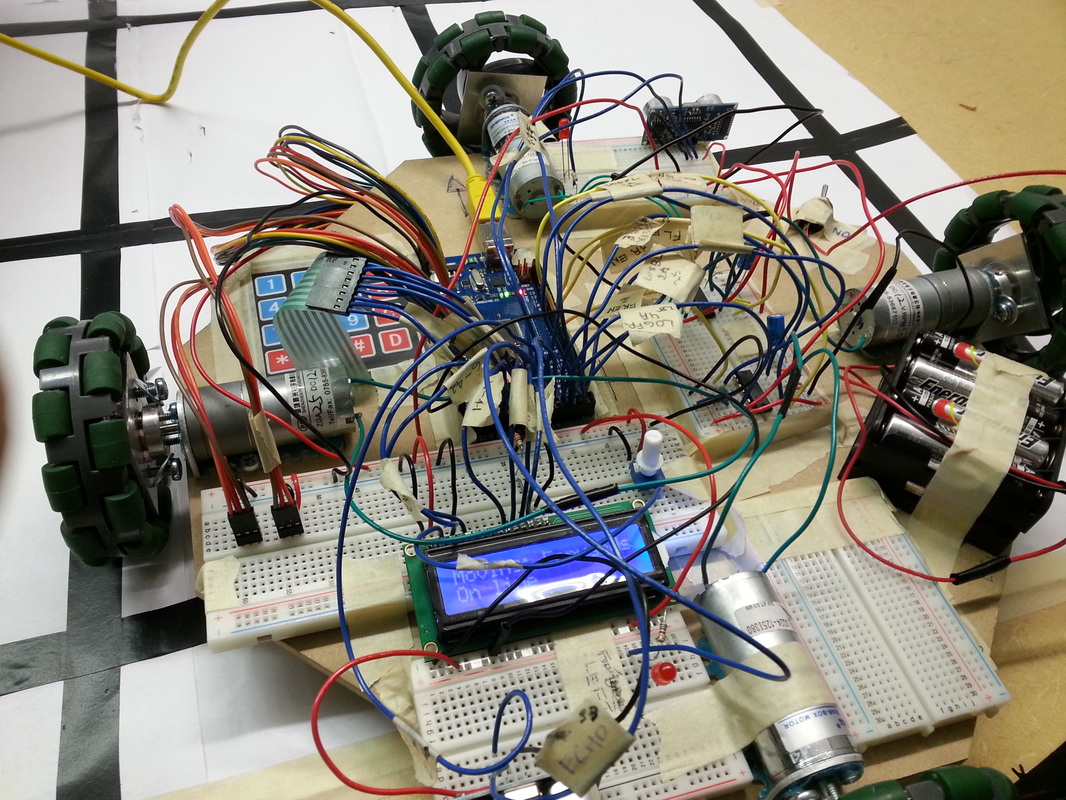
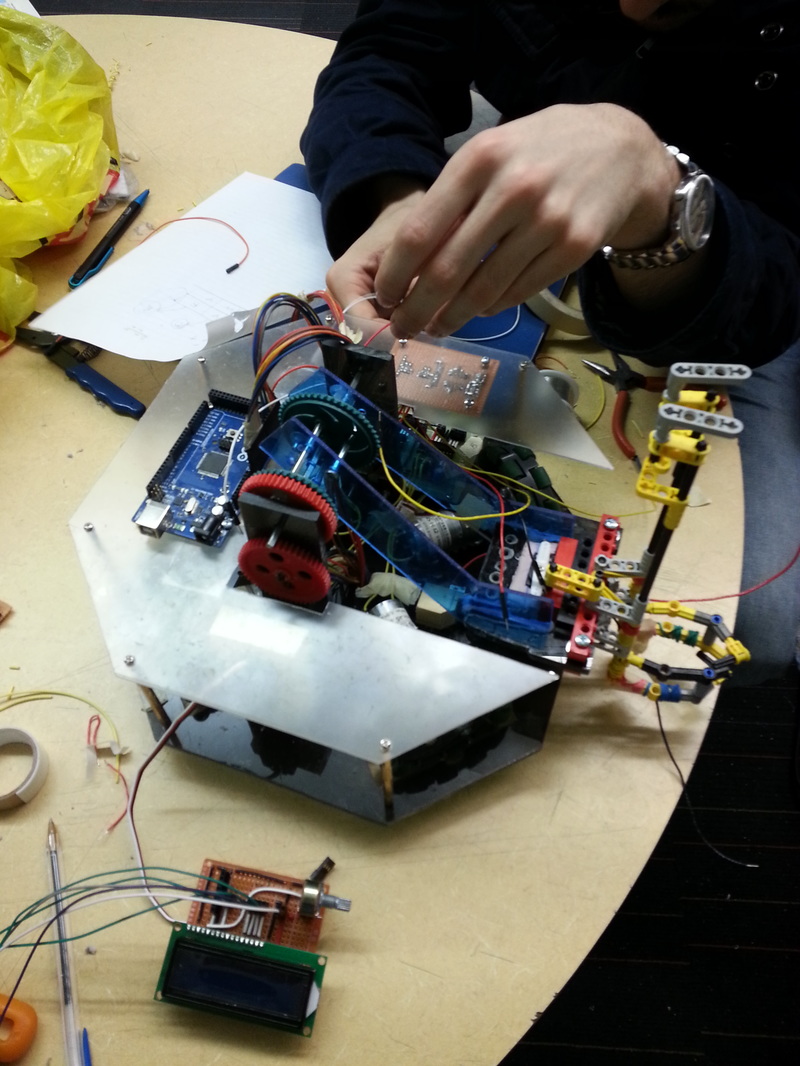
I was the electromechanical member in a 3-person team (two other members for microcontroller and circuits/sensors). Our design focused on performance and mobility. A key feature of my contribution was a highly iterated design for the actuation and structure of the robot. By prototyping many versions of the physical frame, I was able to provide a platform that allowed the robot to be fast, compact, and effective.
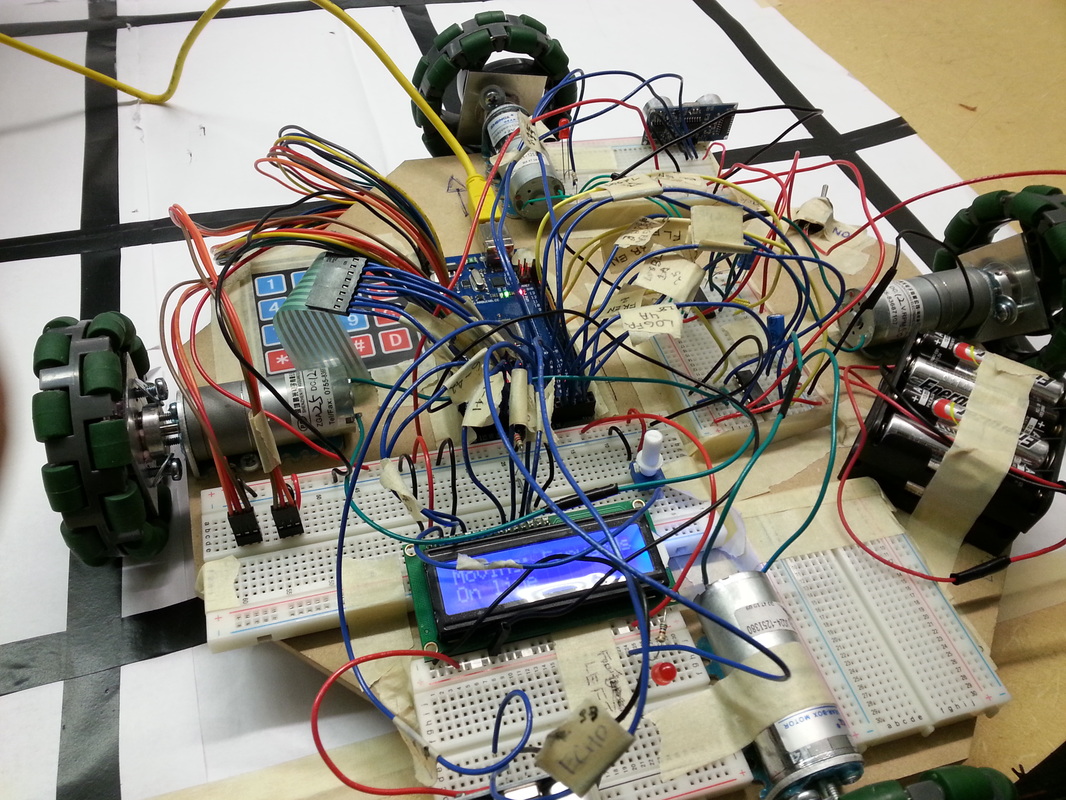
Our design relies on the use of individually powered omni-wheels for movement, allowing for maximum freedom of movement and minimizing maneuvering time between obstacles. A specially designed arm combines both the gripping and placing functions, allowing the ping pong ball to be placed into the board with minimal rebound. The whole robot was run on the Arduino microcontroller platform.